分层设计、通信范式与开发方法论的深度剖析

在软件定义汽车的时代浪潮下,汽车电子系统复杂度呈指数级增长。面对数以亿计的代码行和上百个ECU(电子控制单元)的协同工作,一套标准化、开放化的架构体系成为行业刚需。AUTOSAR(汽车开放系统架构)正是在这样的背景下应运而生,并逐步成为智能汽车的软件基石。
一、AUTOSAR架构深度解析:四层模型与虚拟总线
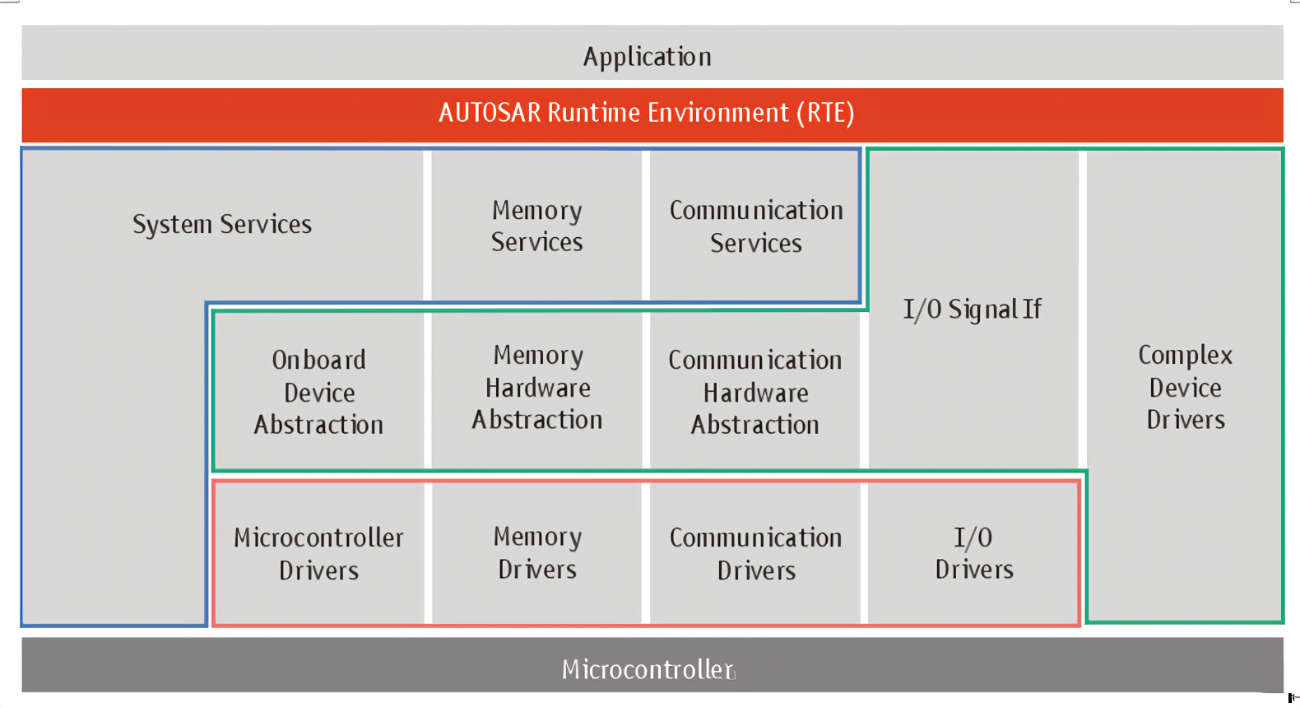
AUTOSAR的核心价值在于实现了应用与硬件的彻底解耦。通过精心设计的分层架构,它将汽车电子软件划分为四个关键层次:
– 应用层(Application Layer):由软件组件(SW-C)构成,每个组件封装特定功能逻辑(如雨刮控制、引擎管理等)。这些组件通过标准化接口通信,完全独立于底层硬件。
– 运行时环境(RTE):作为核心通信枢纽,RTE实现了虚拟功能总线(VFB)的具体化。它提供两种通信机制:发送者-接收者模式(用于异步数据传输)和客户端-服务器模式(用于同步服务调用)。所有应用层组件仅能通过RTE进行交互,形成严格的隔离机制。
– 基础软件层(BSW):细分为三个子层:
– 服务层:提供操作系统、网络管理、存储管理等系统级服务
– ECU抽象层:封装ECU板级资源(如外设连接方式)
– 微控制器抽象层(MCAL):直接操作微控制器外设(I/O、ADC、 CAN等驱动)
– 复杂设备驱动(CDD):位于架构边缘,允许开发者绕过分层限制,直接访问硬件以满足高实时性需求(如点火正时控制)。
图示:AUTOSAR四层架构与通信路径(数据来源:AUTOSAR联盟)
译版:

虚拟功能总线(VFB)是AUTOSAR的核心创新理念。在开发初期,所有SW-C通过虚拟通信通道互联,开发者无需关心组件最终部署在哪个ECU。只有当系统映射完成后,RTE才会将虚拟连接转化为实际的ECU内部通信或总线通信。
二、双平台战略:经典CP vs 自适应AP
随着汽车电子架构演进,AUTOSAR分化出两大平台,应对不同场景需求:
1. 经典平台(CP)
2003年问世,采用静态配置策略,专为资源受限的微控制器设计:
– 基于信号的通信(CAN/LIN总线)
– 硬实时性保障(μs级响应)
– 适用于安全关键系统:刹车控制(ESP)、转向系统(EPS)、发动机管理
2. 自适应平台(AP)
2017年推出,面向高性能计算单元:
– 采用面向服务架构(SOA),支持动态服务发现
– 以以太网为骨干网(100Mbps以上带宽)
– 支持OTA在线更新与动态部署
– 典型应用:自动驾驶系统、智能座舱、车联网
表:CP与AP平台关键技术对比
三、通信机制演进:从信号到服务
AUTOSAR的通信体系经历了革命性进化:
1. CP通信栈
在经典平台中,数据流需穿越多层协议栈:
应用层 → RTE → COM模块 → PduR路由 → CanTp传输 → CanIf接口 → CanDrv驱动
每层增加3-5μs延迟,但通过静态配置优化,整体仍满足实时性要求。安全机制上采用E2E保护(如CRC校验、序列计数)和SecOC(安全车载通信)保障信号完整性。
2. AP通信框架
自适应平台引入ara::com通信框架,关键技术突破包括:
– 服务代理机制:实现服务动态发现与绑定
– DDS集成:支持以数据为中心的发布/订阅模型(DCPS),满足高吞吐量需求
DDS(数据分发服务) 的融入是革命性一步。它通过QoS策略库(如数据时效性、可靠性等级)实现智能数据传输。当AP平台与AI计算单元对接时,DDS可保证传感器数据(如点云)的低延迟分发。
四、开发方法论:从系统配置到代码生成
AUTOSAR定义了一套严谨的开发流程,核心分为三个阶段:
1. 系统配置阶段:
– 使用XML格式描述文件(ARXML)定义SW-C接口、系统拓扑和通信矩阵
– 工具示例:Vector PREEvision进行架构设计
2. ECU设计与配置:
– 从系统配置中提取ECU Extract文件
– 配置任务调度、BSW模块等(如使用Vector Davinci工具)
– 输出ECU配置描述文件
3. 代码生成与集成:
– RTE生成器创建ECU特定通信接口
– BSW配置器生成硬件抽象代码
– 最终编译为ECU可执行文件
表:AUTOSAR开发流程关键产出物

五、行业痛点与创新解决方案
尽管AUTOSAR已成行业标准,其落地仍面临多重挑战:
1. CP轻量化需求
传统CP协议栈需200KB+存储空间,而车灯、水泵等简单控制器常配备128KB Flash芯片。知从科技提出创新方案:
– 协议栈裁剪:保留CAN/CANTP核心栈,移除非必需模块(如CryptoDrv)
– MCAL优化:针对不同MCU定制驱动(如英飞凌TLE989x)
– 编译器优化:采用-Os尺寸优化选项
– 安全精简:构建ASIL-B级轻量安全库
成果显著:整体内存占用<64KB,支持128KB芯片运行,256KB芯片实现AB分区OTA。
2. 开源生态崛起
传统AUTOSAR工具链授权费高昂(单ECU达数万美元),促使开源方案兴起:
– 普华小满OS:全球首个安全车控开源OS,LGPL 2.1协议,适配158款芯片
– 理想星环OS:投入超10亿研发,将芯片适配周期从6个月缩短至4周
– 开源优势:降低开发门槛,避免重复“造轮子”,促进产业协作
3. 芯片协同开发新模式
加特兰微电子创新性地构建AUTOSAR软件协作平台:
– 需求统一管理:整合codebeamer平台,规范需求流程
– 分层接口设计:
– 顶层:验证与交付集成层
– 中层:IP功能层
– 底层:芯片接口层
– 沙盒隔离环境:支持多团队并行开发
该方案使项目人力消耗降低30%,周期缩短30%。
六、未来演进方向
AUTOSAR技术仍在快速迭代中,前沿趋势包括:
1. 混合架构集成:CP+AP+Linux多OS混合部署,通过Hypervisor虚拟化实现隔离
2. DDS深度整合:RTI公司推动DDS与AP平台融合,利用其QoS策略实现自动驾驶数据可靠传输
3. AI赋能开发:加特兰等企业探索AI辅助芯片验证,预测硬件缺陷
4. 安全机制升级:针对AP平台开发ASIL-D级安全框架,满足全自动驾驶需求
随着中央计算+区域控制架构普及,AUTOSAR将持续演进,在保障功能安全的前提下,为软件定义汽车提供坚实基座。